|
Hee Jae Kim I am a fourth-year Ph.D. student at Boston University, advised by Prof. Eshed Ohn-Bar. My research interests lie in computer vision, robotics, and machine learning with their applications in autonomous and assistive systems. Prior to BU, I got my master's degree (2019-2021) at the Ewha Womans University, where I worked with Prof. Byung-Uk Lee and Prof. Jewon Kang, on multi-view 360-degree videos. |

|
News
|
Research |
|
BranchOut: Capturing Realistic Multimodality in Autonomous Driving Decisions
Hee Jae Kim, Zekai Yin, Lei Lai, Jason Lee, and Eshed Ohn-Bar Conference on Robot Learning (CoRL), 2025 project page / paper / poster We introduce BranchOut, a GMM-based diffusion planner and multimodal benchmark, towards the goal of modeling and evaluating realistic, human-like decision-making in autonomous driving. To support this, we develop a human-in-the-loop, photorealistic simulation framework that enables scalable collection of diverse, reactive trajectories and facilitates fine-grained, human-aligned evaluation of multimodal realism. Our end-to-end framework explicitly captures the rich, multimodal distribution of plausible future behaviors using a compact GMM-based diffusion model, achieving state-of-the-art performance across both error-based and distributional metrics. |
|
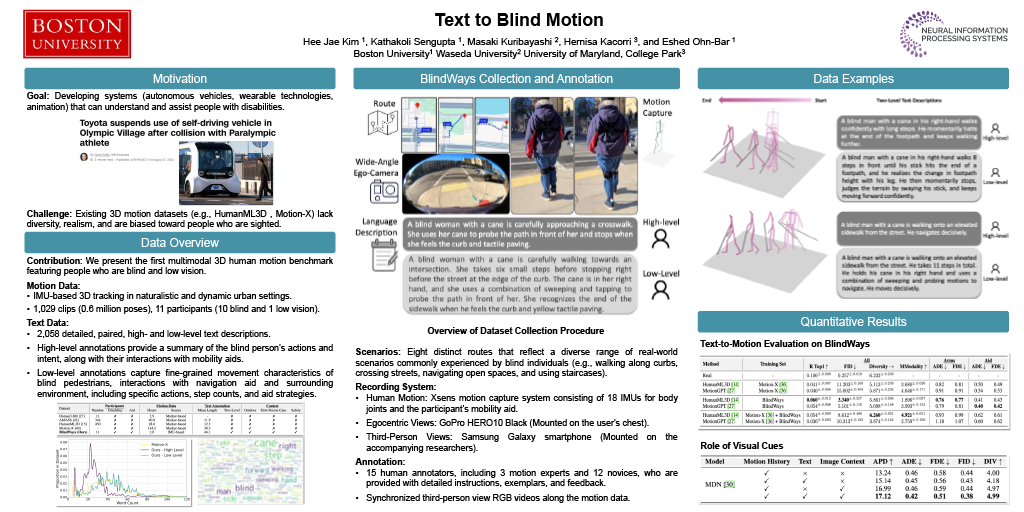
Text to Blind Motion
Hee Jae Kim, Kathakoli Sengupta, Masaki Kuribayashi, Hernisa Kacorri, and Eshed Ohn-Bar Neural Information Processing Systems (NeurIPS), 2024 project page / paper / data / poster We introduce BlindWays, the first multimodal 3D human motion benchmark for pedestrians who are blind, featuring data from 11 participants (varying in gender, age, visual acuity, onset of disability, mobility aid use, and navigation habits) in an outdoor navigation study. We provide rich two-level textual descriptions informed by third-person and egocentric videos. We benchmark state-of-the-art 3D human prediction models, finding poor performance with off-the-shelf and pretraining-based methods for our novel task. |
{kind=link}
|
Motion Diversification Networks
Hee Jae Kim and Eshed Ohn-Bar Computer Vision and Pattern Recognition (CVPR), 2024 project page / paper / code / poster We introduce Motion Diversification Networks, a novel framework for learning to generate realistic and diverse 3D human motion. Towards more realistic and functional 3D motion models, this work uncovers limitations in existing generative modeling techniques, particularly in overly simplistic latent code sampling strategies. |
|
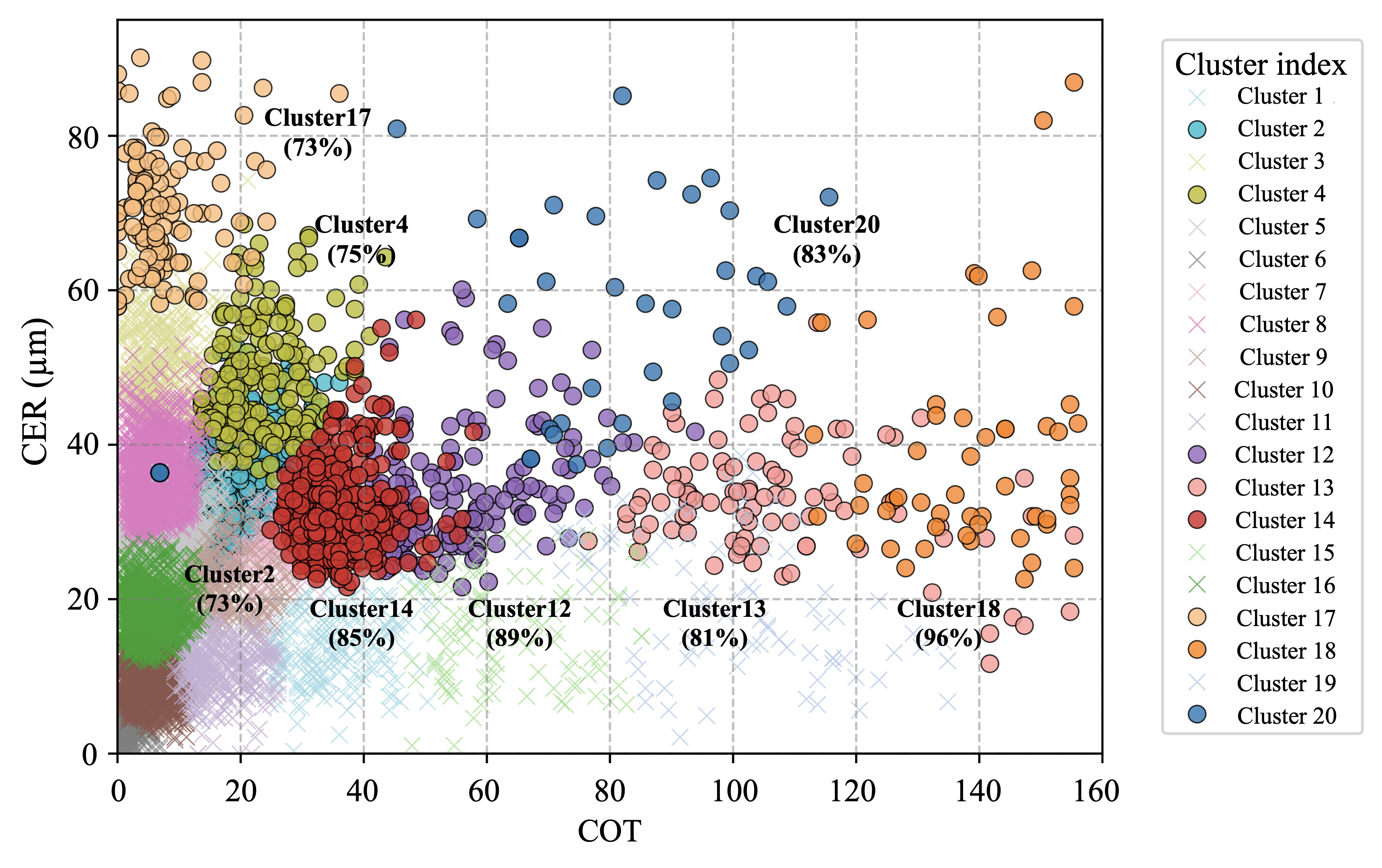
Unsupervised Clustering of Geostationary Satellite Cloud Properties for Estimating Precipitation Probabilities of Tropical Convective Clouds
Doyi Kim, Hee Jae Kim, and Yong-Sang Choi Journal of Applied Meteorology and Climatology (JAMC), 2023 paper We propose a framework for identifying tropical convective clouds (TCCs) with high precipitation probabilities using geostationary satellite imagery. Our findings show that specific cloud features—such as colder tops and larger particle sizes—consistently signal precipitation likelihood across different regions and seasons. Our method enhances satellite-based precipitation forecasting, especially in tropical regions with limited ground-based observations. |
|
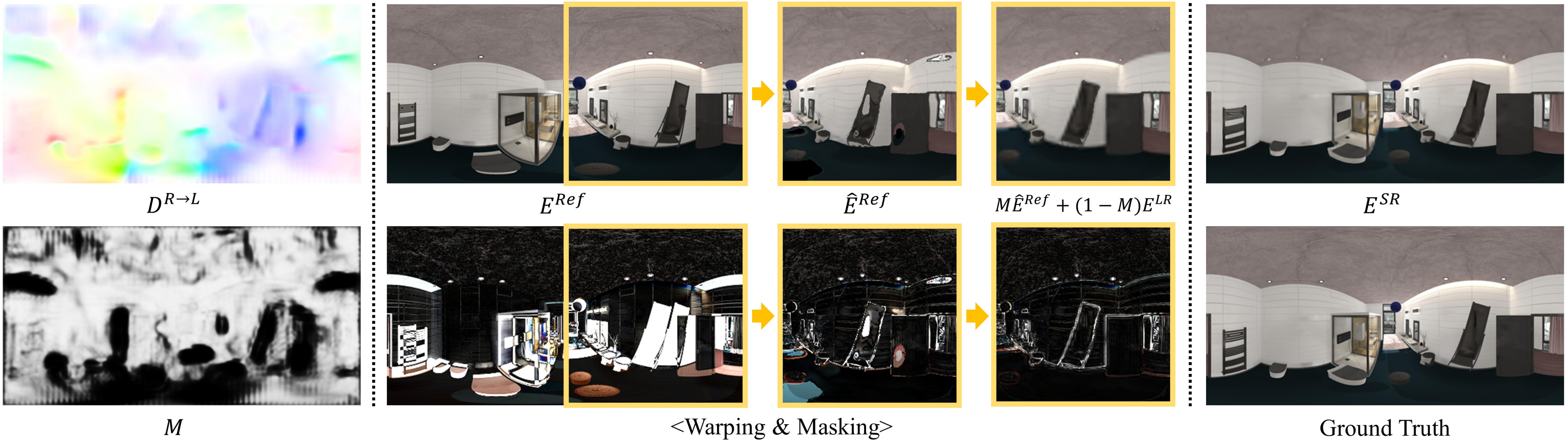
360° Image Reference-Based Super-Resolution using Latitude-Aware Convolution Learned from Synthetic to Real
Hee Jae Kim, Jewon Kang, and Byung-Uk Lee IEEE Access, 2021 project page / paper / code We propose an efficient reference-based 360° image super-resolution (RefSR) technique to exploit a wide field of view (FoV) among adjacent 360° cameras. We do not assume any structured camera arrays but use a reference image captured in an arbitrary viewpoint. Accordingly, we develop a long-range 360 disparity estimator (DE360) to overcome a large and distorted disparity between equirectangular projection (ERP) images, particularly near the poles. |
ServiceReviewer
Organizer
|